Traumpaarung: Drehmomentaufnehmer in Kupplung integriert
von Dr. Wilfried Krimmel
Downloads
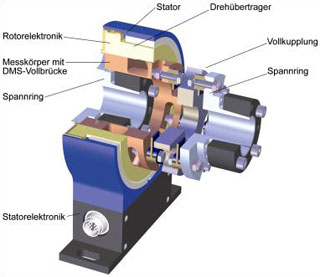
- Bild 1: Aufbau des Drehmomentsensors DR-2554
Die Eigenresonanz des mechanischen Aufbaus einer Drehmomentmesseinrichtung gehört zu den wichtigen dynamischen Eigenschaften der Messanordnung. Mit dem neuen Drehmomentsensor DR-2554 ist es gelungen, diese Eigenresonanz um mehr als den Faktor 3 zu vergrößern, wodurch dynamische Messungen mit noch höherer Präzision möglich werden. Dies wurde durch eine konsequente Weiterentwicklung der Drehmomentsensoren und eine enge Zusammenarbeit mit einem Kupplungshersteller erreicht. Zusätzlich ergab sich eine große Flexibilität bei den Adaptionsmöglichkeiten bei gleichzeitig kurzer Bauweise.
In der Drehmomentmesstechnik werden sehr häufig dynamische Messungen durchgeführt. Hierbei ist zu unterscheiden, ob die Anregung des Drehmoments periodisch erfolgt, oder ob es sich um einen einmaligen Vorgang handelt. Typische periodische Drehmomentverläufe werden bei Kolbenmotoren, Pressen, Zahnstößen in Getrieben, Asynchronmotoren usw. beobachtet. Die Drehmomentverläufe bei Anfahr- und Bremsvorgängen sind Vertreter für nichtperiodische Anregungen.
Bei periodischen Verläufen zeigt der Drehmomentaufnehmer zusammen mit den an ihn montierten Teilen die Eigenschaften eines mechanischen Schwingkreises, mit einer Überhöhung der Amplitude in der Resonanzfrequenz. Folge daraus ist, dass die Anregungsfrequenz nicht gleich der Eigenresonanz der Anordnung sein darf, da durch die geringe Dämpfung des Messaufbaus mit starken Überhöhungen des Drehmoments gerechnet werden muss. Bei einer Anregungsamplitude nahe dem Nenndrehmoment können somit Drehmomente entstehen, die Teile im Wellenstrang beschädigen. Ein schnelles Durchfahren der Eigenresonanz ist aber durchaus möglich, denn das System hat keine Zeit, um die Amplitude gefährlich ansteigen zu lassen. Weiter gilt es zu beachten, dass jede periodische Anregung mit Hilfe einer Fourierreihe in diskrete sinusförmige Frequenzteile zerlegt werden kann. Die Frequenzen der Sinusschwingungen sind dabei ein vielfaches der Grundfrequenz.
Ein Vertreter für nichtperiodische Signale ist z.B. die Sprungfunktion. Eine sprungförmige Änderung des Drehmomentes bewirkt eine Schwingung mit der Eigenresonanz des mechanischen Aufbaus. Die Amplitude der Schwingung ist abhängig von der Dämpfung und kann maximal den zweifachen Betrag der Sprungamplitude annehmen.
Wir haben also bedingt durch die Eigenresonanzen des mechanischen Aufbaus Verfälschungen des Messsignals zu erwarten, denn der Messaufbau wirkt wie ein mechanischer Tiefpass. Unterhalb der Eigenresonanz werden die Drehmomentamplituden sehr gut gemessen. Im Resonanzbereich haben wir starke Überhöhungen zu erwarten und bei größeren Drehmomentamplituden ist mit der Beschädigung von Teilen zu rechnen. Oberhalb des Resonanzbereichs erhalten wir geringere Messwerte. In der Praxis ist deshalb eine möglichst hohe Eigenresonanz des Sensors erwünscht.
Bestimmung der Eigenresonanz
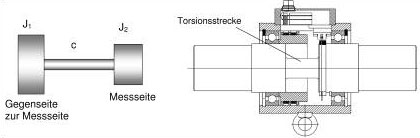
- Bild 2: Modell für 2 Massenschwinger (links), typischer Aufbau eines Drehmomentsensors (rechts)
Im einfachsten Fall kann ein Drehmomentsensor, wie in Bild 2: dargestellt, als Schwinger mit einer Drehfeder, an deren beiden Enden je eine Masse befestigt ist, betrachtet werden.
Es ist zwischen Messseite und Antriebseite (Gegenseite zur Messseite) zu unterscheiden. Das Massenträgheitsmoment eines Körpers stellt seinen Widerstand gegen Drehbeschleunigungen dar. Zwischen den beiden Trägen Massen befindet sich der Torsionskörper, welcher hauptsächlich zur elastischen, federnden Wirkung beiträgt. Für ihn ist die Federkonstante das entscheidende Maß. Zur näherungsweisen Berechnung der Eigenresonanz werden die Massen den beiden Seiten der Torsionsstrecke zugeordnet.
Die Torsionseigenresonanz f der Anordnung berechnet sich damit nach Gleichung:
Wir können der Gleichung entnehmen, dass je größer die Federkonstante ist, umso höher auch die Eigenfrequenz der Messanordnung wird. Umgekehrt gilt: Je kleiner das Massenträgheitsmoment wird, umso größer wird ebenfalls die Eigenresonanz. Ein guter Drehmomentsensor hat also einen mechanisch möglichst steifen Aufbau und geringe Massen. Da der Drehmomentaufnehmer über drehsteife Kupplungen in den Wellenstrang eingebaut wird, ist es sinnvoll, in die Betrachtung der Eigenresonanz die verwendeten Kupplungen mit aufzunehmen.
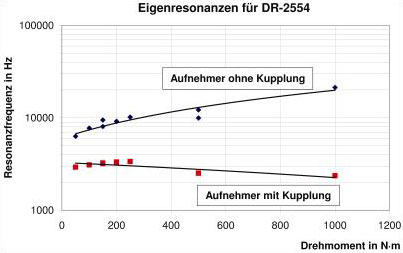
- Bild 3: Eigenresonanzen für Aufnehmer mit und ohne Kupplung
Drehmomentaufnehmer DR-2554 mit integrierter Vollkupplung
Der von Lorenz Messtechnik GmbH neu entwickelte Drehmomentsensor wurde zuerst ohne Kupplung und Einspannteile berechnet. Danach erfolgte die Berechnung der empfohlenen Kombination aus Spannnabe an der Antriebseite und Vollkupplung mit Spannnabe an der Messseite. Im Bild 3: sind die Ergebnisse graphisch dargestellt.
Zum Vergleich wurde die Berechnung an einer Kombination mit konventionellem Aufbau aus Drehmomentsensor zwischen zwei Halbkupplungen durchgeführt. Die wichtigsten Daten sind in der folgenden Tabelle 1 zusammengefasst.
| Aufnehmertyp | Aufnehmer ohne Kupplung | Aufnehmer mit Kupplung |
|---|---|---|
| Tabelle 1: Vergleich der Eigenresonanzen für konventionellen Sensor und DR-2554 | ||
| konventioneller Sensor | 1 kHz … 6 kHz | 300 Hz … 1 kHz |
| DR-2554 | 6 kHz … 20 kHz | 2,3 kHz … 3,3 kHz |
Der Vergleich zeigt, dass der DR-2554 eine mehr als 3-fach höhere Eigenresonanz hat, als ein konventioneller Drehmomentsensor, dies gilt sowohl für den Sensor als auch für die Kombination aus Drehmomentsensor mit Kupplungen. Der neue Sensor schiebt also die für dynamische Messungen notwendige hohe Eigenresonanz zu wesentlich höheren Werten als bei konventionell aufgebauten Drehmomentsensoren.
Aufbau des Drehmomentsensors
Der Aufnehmer besteht aus einem feststehenden Teil, dem Stator, und dem rotierenden Teil dem Rotor, siehe hierzu Bild 1.
Im Stator sind die Statorelektronik, die für die Signalübertragung notwendigen Spulen und der Steckverbinder für den elektrischen Anschluss des Sensors untergebracht. Hier finden wir auch den optionalen Drehzahlsensor. Der nicht gelagerte Rotor besteht aus dem Messkörper, auf den die Vollbrückenschaltung mit Dehnungsmessstreifen appliziert ist. Am Messkörper ist die rotierende Elektronik und der rotierende Teil des Drehübertragers befestigt. An der linken Seite des Messkörpers ist ein Spannring und an der rechten Seite ist die Vollkupplung befestigt.
Durch den lagerlosen Aufbau der Messanordnung hat man bei den Messungen mit keiner zusätzlichen Lagerreibung der Drehmomentmesswelle zu rechnen. Jede Reibung, auch die eines Kugellagers, bedeutet eine Verfälschung des Drehmoments und eine zusätzliche Erwärmung des Aufnehmers. Da der Aufnehmer keine verschleißenden Teile beinhaltet, ist er nahezu wartungsfrei. Durch die Verringerung der Anzahl von Teilkomponenten hat der Sensor sehr kleine Einbaumaße. Das Messelement besitzt eine hohe Messgenauigkeit, es hat auch eine sehr große Bohrung, die in Sonderfällen zur Durchführung von Leitungen bzw. Schläuchen genutzt werden kann.
Kombinationsmöglichkeiten für Kupplungen
Durch die Kombination des Sensors DR-2554 mit der Wellenkupplung Roba-DS aus dem Hause Mayr Antriebstechnik (Bild 4) entsteht ein Modul, welches hinsichtlich Leistungsdichte und Marktanforderung dem aktuellen Stand der Technik entspricht. Über diverse Passfedernaben, Spannring- und Klemmnaben werden neben einer Flanschverbindung 6 verschiedene Welle-Nabe-Verbindungen angeboten.
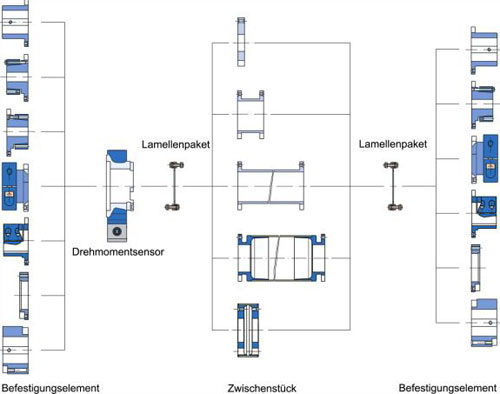
- Bild 4: Kombinationsmöglichkeiten für Kupplung und Drehmomentsensor
Um neben Axial- und Winkelversätzen auch entsprechende Lateralversätze auszugleichen, wird die Wellenkupplung grundsätzlich in einer doppelkardanischen Ausführung angeboten.
Je nach Ausführung der gewählten Verbindungskomponente können Anforderungen wie:
- kompakte Bauweise
- flexible Baulänge
- hohe Drehzahl bei kurzer und langer Bauform
- geringe Unwuchten
- Kriechstromisolation
erfüllt werden.
Mit dieser lagerlosen Drehmomentsensor-Kupplung-Kombination ist es also gelungen, hohe Dynamik mit großer Flexibilität zu verbinden. Dabei ist zusätzlich noch ein kostengünstiger Sensor mit kurzer Bauweise entstanden.
Literatur
Holzweißig, F.; Dresig, H.: Lehrbuch der Maschinendynamik
(4. neubearbeitete Auflage). Fachbuchverlag Leipzig-Köln, 1994